|
Steps to follow:
| 1. | Setup the drive/motor for RS-232 communication |
| 2. | Set EasyMotion Studio for communication via RS-232 with the drive/motor |
Step 1 Setup the drive/motor for RS-232 communication
| 1. | Power-Off your drive/motor |
| 2. | In order to use the RS-232 communication, you need to connect your PC with the Technosoft drive/motor through an RS-232 serial cable. If the drive/motor is equipped with a standard 9-pin DB9 connector for serial communication, use a 9-wire standard serial cable: male-female, non-inverting (e.g. one-to-one), else check the drive/motor user manual for cable connections. |
| 3. | If the drive/motor supports also RS-485 communication, set the RS-232/RS-485 switch (or solder-joint) to the position RS-232. |
| 4. | Power-On the drive/motor |
Step 2 Set EasyMotion Studio for communication via RS-232 with the drive/motor
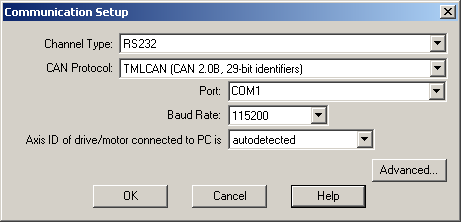
| 1. | Select menu command “Communication | Setup” |
| 2. | Select at “Channel Type” RS-232 (default). |
| 3. | Select the “CAN Protocol” between the drives/motors connected in the CAN-bus network, the drive/motor connected to PC acting as a retransmission relay (see Communication Protocols). You can choose either TMLCAN (CAN2.0B, 29-bit identifier) or CANopen or TechnoCAN (CAN2.0A, 11bit identifier). |
| 4. | Select at “Port” the serial port of your PC, where you have connected the serial cable. By default the selected port is COM1 |
| 5. | Select the desired baud rate from “Baud Rate” list |
| 6. | Set the “Axis ID of the drive/motor connected to PC”. The default option is autodetected enabling EasyMotion Studio to detect automatically the axis ID of the drive connected to the serial port. If your drive/motor doesn’t support this feature (see remark below) select its axis ID from the list. The drives/motors axis ID is set at power on using the following algorithm: |
| a. | With the value read from the EEPROM setup table containing all the setup data |
| b. | If the setup table is invalid, with the last axis ID value read from a valid setup table |
| c. | If there is no axis ID set by a valid setup table, with the value read from the hardware switches/jumpers for axis ID setting |
| d. | If the drive/motor has no hardware switches/jumpers for axis ID setting, with the default axis ID value which is 255. |
Remark: When the TechnoCAN communication protocol is used the Axis IDs, of the drives/motors and of the PC, are interpreted as modulo 32.
If the communication works properly, you’ll see displayed on the status bar (the bottom line) of the EasyMotion Studio the text “Online”, the axis ID of the drive/motor and the firmware version read from the drive/motor.
Remark: If your drive/motor firmware number:
| • | Starts with 1 – examples: F100A, F125C, F150G, etc., or |
| • | Starts with 0 or 9 and has a revision letter below H – examples: F000F, F005D, F900C |
you can’t use the axis ID autodetected option.
See also:
RS-232 Communication Troubleshoots
Advanced Communication Setup
Communication Setup
|